Berkeley Humanoid Lite 개요
설계 및 특징
실험 및 시연
성능 비교
Berkeley Humanoid Lite - 오픈소스 로봇
 1 week ago
5
1 week ago
5
Related

학교 급식비 채무 상환 결정
41 minutes ago
0
HN 공개: 약 500ms 지연 시간의 실시간 AI 음성 채팅
1 hour ago
0
VectorVFS - 파일 시스템을 벡터 데이터베이스로 활용
2 hours ago
0
판사, Meta의 AI 저작권 소송을 "다음 테일러 스위프트에 대한 문제"라 언급
2 hours ago
0
Low-Bit LLM을 위한 상용 DRAM에서 구현된 매트릭스-벡터 곱셈
2 hours ago
1
LLM 샘플링의 모든 것: 더미를 위한 현대적 가이드
3 hours ago
1
Go 언어에서 Graceful Shutdown을 구현하는 실용적 패턴
3 hours ago
0
경험 많은 LLM 사용자지만, 실제로는 자주 사용하지 않는 이유
3 hours ago
0
Popular
Anubis works
3 weeks ago
73
OpenAI, GPT 4.1 공개
3 weeks ago
71
OpenAI, o3 와 o4-mini 모델 공개
2 weeks ago
53
[Vibe Coding 기업 적응기] Part1: v0.dev와 함께한 3주간의 기록
2 weeks ago
51
"100 Go Mistakes and How to Avoid Them"의 뒷이야기
3 weeks ago
47

How to Create Your First SAPUI5 Application
3 weeks ago
38


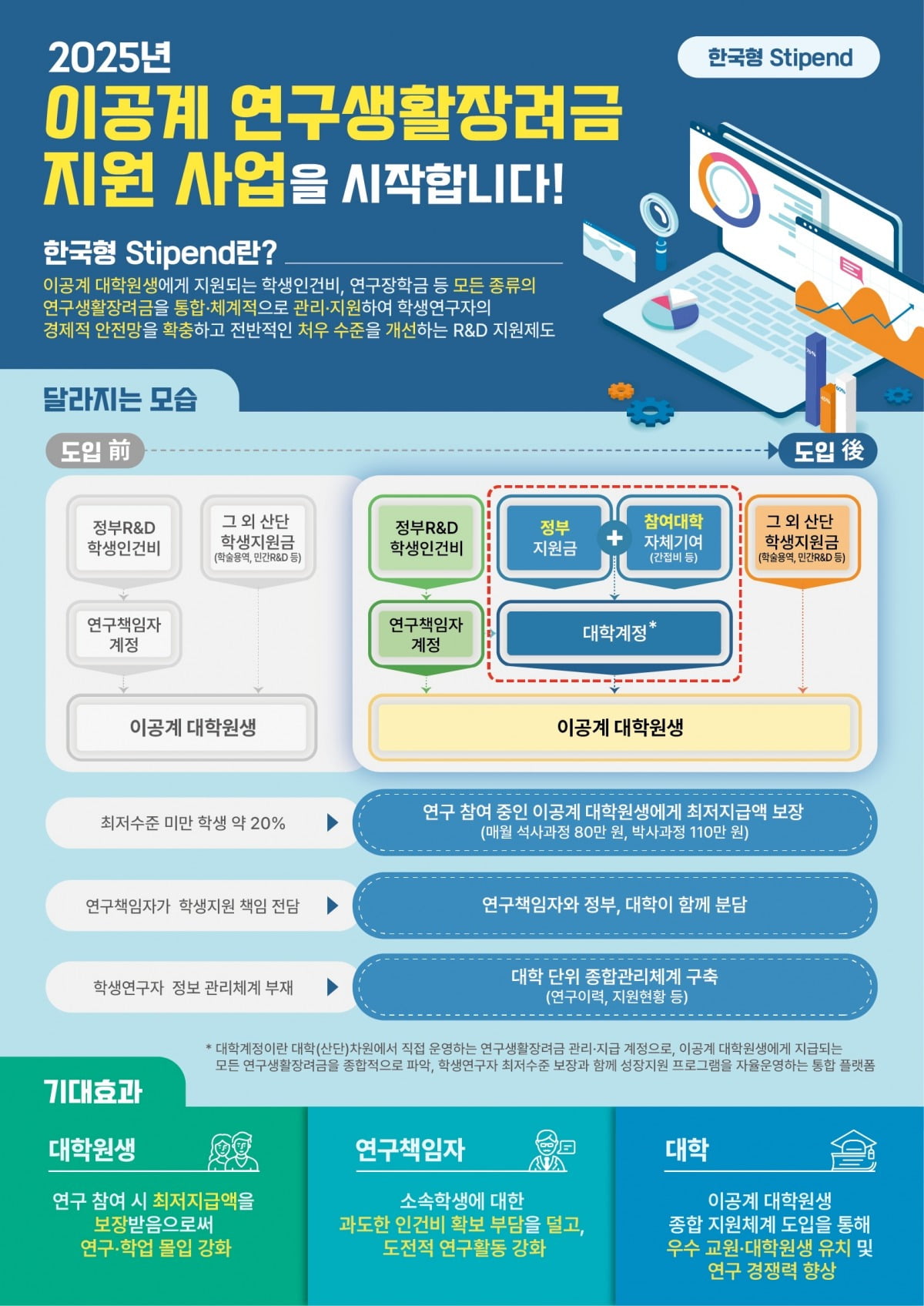
이공계 대학원생, 월 110만원 받는다…'한국형 스타이펜드' 첫걸음
1 week ago
32
 English (US) ·
English (US) · © Clint's Theme Park 2025. All rights are reserved
