이 튜토리얼에 대하여 Kalman Filter에 대하여개요
Kalman Filter 소개
칼만 필터 튜토리얼
 5 hours ago
2
5 hours ago
2
Related

벌이 사람을 쏘면 죽는 이유
8 hours ago
2
VS Code 애완동물
11 hours ago
1
이 필기체를 읽을 수 있나요? 국립문서보관소의 도움 요청
11 hours ago
4
LinkedIn은 새로운 HR - 회사 프로세스에 지친 사람들이 소셜미디어에 끔찍한 상사를 신고중
11 hours ago
3
HN 공개: Mermaid 클래스 다이어그램 편집용 GUI
12 hours ago
3
ChatGPT 사용은 환경에 나쁘지 않음
12 hours ago
2
저녁 식사 시 높은 Potassium 섭취, 수면 장애 감소와 연관 – 연구
12 hours ago
2
AI 및 종단간 암호화 논의
12 hours ago
3
Popular
![1월 둘째 주, 마켓PRO 핫종목·주요 이슈 5분 완벽정리 [위클리 리뷰]](https://img.hankyung.com/photo/202501/99.34900612.1.jpg)
1월 둘째 주, 마켓PRO 핫종목·주요 이슈 5분 완벽정리 [위클리 리뷰]
1 week ago
46
!["이러다, 다 죽어!"…'오징어게임2' 망하면 큰일 난다는데 [김소연의 엔터비즈]](https://img.hankyung.com/photo/202412/01.39034730.1.jpg)
"이러다, 다 죽어!"…'오징어게임2' 망하면 큰일 난다는데 [김소연의 엔터비즈]
3 weeks ago
41
구글 검색사업관련 미 법무부의 매각명령에 대한 역제안 발표
4 weeks ago
27

일론 머스크 우주 천하 깨지나…블루오리진 '도전장'
2 weeks ago
25
!["나랑 XX 할래"…돌봄 로봇과 성적 대화 하는 노인들 [유지희의 ITMI]](https://img.hankyung.com/photo/202501/01.39164747.1.png)
"나랑 XX 할래"…돌봄 로봇과 성적 대화 하는 노인들 [유지희의 ITMI]
1 week ago
24
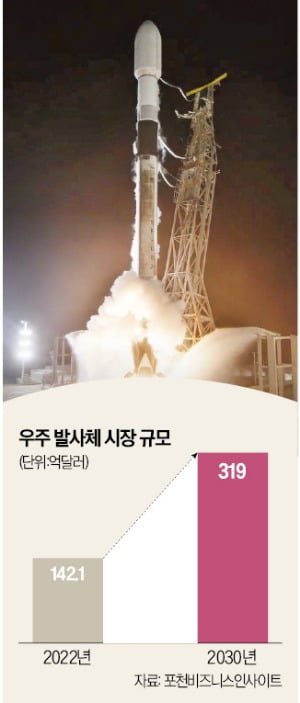
사흘에 한 번 로켓 쏜 스페이스X…발사장 포화에 '우주공항' 뜬다
1 week ago
22

동료 줄리어스
3 weeks ago
19
How Hamburg Prevents the Super Traffic Jam
3 weeks ago
17
 English (US) ·
English (US) · © Clint's Theme Park 2025. All rights are reserved
